So after 5 previous versions that had various flaws, I now have an Arduino robot that actually works and although basic is very cheap – although there a probably a few more flaws so please point them out to me but this is a good start on how to make your own robot.
In order to catch up, please see my previous posts below, describing the problems that the other 5 versions had, how the h-bridge chip works and using the SRF05 ultrasound distance sensor.
larryBot – Arduino robot versions 0.1 to 0.5 lessons learned
Control a DC motor with Arduino and L293D chip
Arduino SRF05 Distance Sensor
Now that you’re up to speed, lets start by fixing the flaws in the previous version, this was the case that my motors were drawing way too much current and the L293D chip from ST Micro couldn’t output enough current for each motor.
So, I replaced the chip with the snappy named ‘SN754410‘ from Texas Instruments. This has EXACTLY the same 16 pin layout as the L293D chip and all of the same features except that it can output 1.2 amps per channel rather than the now tiny 0.6 amps of the L293D. Pin configuration diagram below is the same for the L293D as it is for the SN754410, I recommend the SN754410 Arduino comination.
Great I’ve now got more current to my motors, but their stall current is still at over 2 amps, I could add a heatsink to the chip and pass more current through it, but instead I got some more efficient motors than the Mabuchi FA-130’s that came with the Tamiya gearbox. These motors are made by Solarbotics and are their RM3 series which fit perfectly, can handle 4 times the voltage but use a fraction of the current – typically at 9v they use just over 1 amp. Perfect.
Having corrected this, larryBot v0.6 was go! I still faced a lack of power to the DC motors – either because my batteries were running low or not able to supply the current. But since my new motors could run up to 12 volts (instead of the puny 3v of the originals) I decided to use a 9v battery to power them instead of my 4 AA’s.
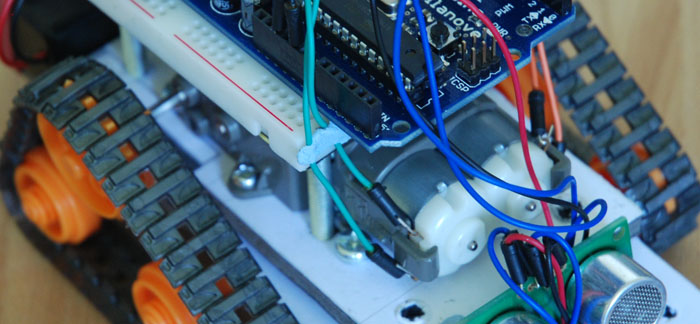
Watching larryBot move is great, even on carpet and with the tank tracks 9 times out of ten he can climb small obstacles or has enough traction to shunt them out the way. Anyway enough waffling – here’s how he’s made…
The Arduino Robot Tracked Chassis
You could use anything you want really – construction sets, your own custom fabricated chassis etc… But since I’m cheap I managed to get a pile of foamboard for my chassis. I can waste and reuse as much of this as I want so its no problem if I make a mistake or want to improve it. Also in theory this leads to rapid prototyping, so when I do decide to fabricate a chassis I know exactly where the best places are for holes, mounts etc…
The robot chassis parts and tools:
Small Phillips/ cross-head screwdriver
Gluegun
Craft knife
Pencil
Ruler
Assorted nuts and bolts – A good set of M series nuts and bolts
Foamboard 5mm thick – 1 A4 sheet is plenty
Tamiya gearbox 70097 – assembled in mode A
Tamiya track and wheel set 70100
Elastic bands (normally dropped by the postie)
Read more: Obstacle avoidance Arduino robot – build your own larryBot