DoggieLox (the name has been changed to protect the guilty) is known for making his way upstairs, sleeping on the beds, munching down on the cat’s food and general mischief.
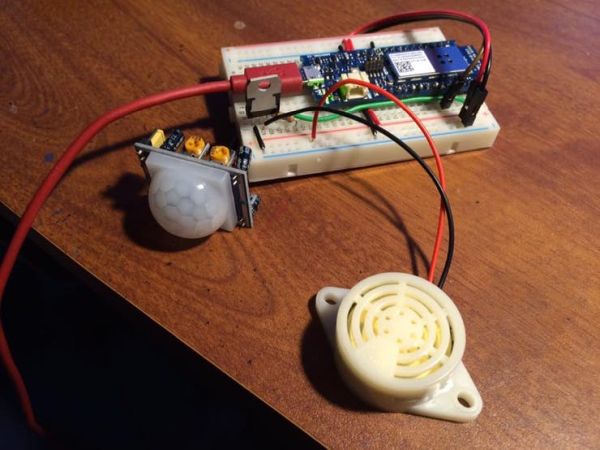
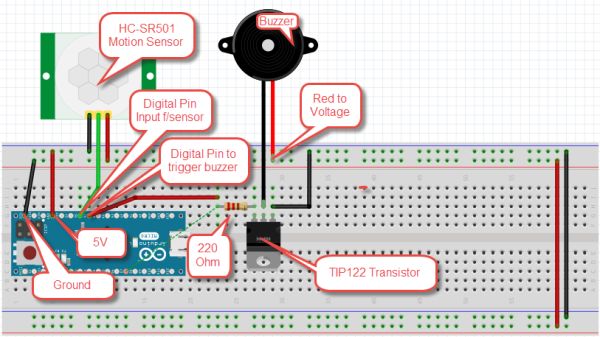
I wanted to get him to cooperate with something like a shock collar. This simple device uses the Arduino MKR1000 with a buzzer and motion detector connected to it. I am using Windows 10 to control the Arduino using Windows Remote Arduino. I have a camera hooked up to my Windows 10 Surface so when the alarm goes off, it takes a picture so I know who the trespasser who. I also log an alert with my Azure IoT hub so I can get notifications (I am currently using the Azure IoT hub explorer to send and receive messages). I am also monitoring my Azure IoT Hub for messages to arm or disarm the dog watcher, so I can turn it off remotely.
I designed this so it will work either on my Surface or my Raspberry Pi 2. The Raspberry Pi is a better option so the camera can be left on the stairs, or wherever needed, to catch the culprit in the act. NOTE: there are a limited number of webcams that work with Windows 10 IoT on the Raspberry Pi, so check the hardware compatibility list.