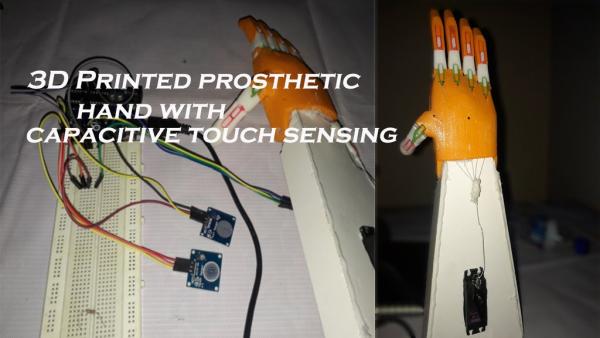
In this Instructables I’ve come with an idea that can be implemented to existing 3d printed prosthetic hands. In existing electrically powered prosthesis I Couldn’t find the use of capacitive touch sensing technology for the actuation of fingers. This project combines two very cool things, Arduino with Capacitive touch sensing for the actuation and remix of e-NABLE Phoenix hand design.
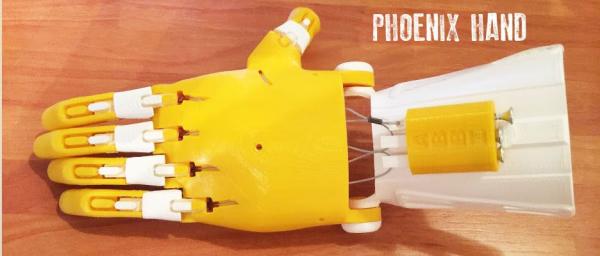
Basically the phoenix hand is a body powered hand, What I’ve done on this project is that I converted it into an electrically powered prosthesis by choosing required part design.
The advantage of capacitive touch sensing is, through touch you can actuate the fingers easily. Currently this model cannot control individual fingers and more development is required in weight carrying capacity and grasping capacity.
**Note: It is a prototype model, more improvements are required
Step 1: Gather the Parts:
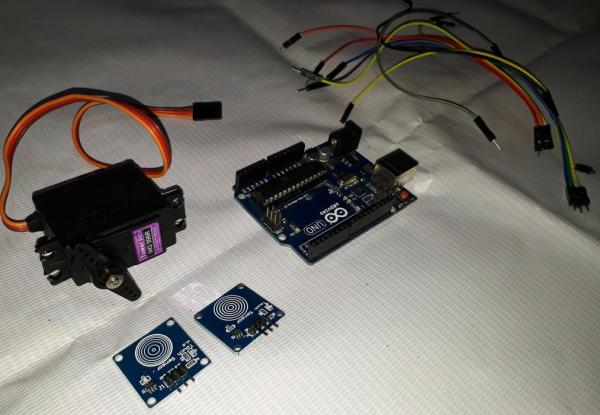 Electronics Parts:
Electronics Parts:
- Arduino Uno
- TTP223 Touch Sensor 2
- MG996R Servomotor
Assembly of Phoenix hand:
The Assembly details of phoenix hand is mentioned below steps
I have used flexor as fishing line and extensor as rubber bands
Tools:
- 3d printer
- Glue gun
Step 2: Printing the Hand :
This project uses previously designed e-NABLE Phoenix hand .
 As per my requirements I have printed only the following parts
As per my requirements I have printed only the following parts
Fingers
- finger_phalanx.stl -4 pieces
- fingertip_long.stl -2 pieces
- fingertip_short.stl -2 pieces
- thumb_phalanx.stl -1 piece
- thumbtip.stl -1 piece
Palm
- palm_right_new_supports.stl -1 piece
Snap Pins
- fingertip_pin.stl – 4 pieces
- knuckle_pin_long.stl -1 piece
- knuckle_pin_short.stl -2 pieces
- thumb_knuckle_pin.stl – 1 piece
- thumbtip_pin.stl – 1 piece
Since there are already detailed instructions on how to build this ,I won’t go into detail
For printing I used a Flsun 3d printer. In total, it took 10-12 hours to print
(note:these parts are for a right hand)
Step 3: Assembly of Hand :
The build process of phoenix hand is already available
So I won’t go into too much detail,If you have any doubt please leave a comment
I have used flexor as fishing line and extensor as rubber band.
**some smoothing may be required for smooth fit
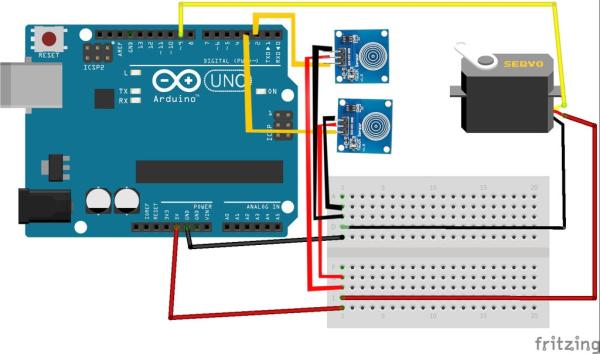
Step 4: Electronics Part:
The actuation is controlled through 2 touch sensors(TTP223) ,The input from touch sensor opens and closes the fingers through servo motor.
Circuit Diagram: